സിമന്റ് ടാങ്ക് കാർ കാർ ബേസ് വെൽഡിംഗ് ലേസർ വെൽഡിംഗ് ഉപയോഗിച്ച് ഏഴ് അക്ഷ ഭൂമി ഭ്രമണപഥം എട്ട് അക്ഷ ഭ്രമണം
-വർക്ക്പീസിന്റെ സ്ഥാനം വളരെ വ്യത്യാസപ്പെട്ടിരിക്കുന്നു
-വർക്ക്പീസ് കണക്ഷനിൽ വ്യതിയാനം നിലനിൽക്കുന്നു.
- ഉയർന്ന വെൽഡിംഗ് കൃത്യത ആവശ്യമാണ്
- മോശം വെൽഡിംഗ് പരിസ്ഥിതിയും പുകയും
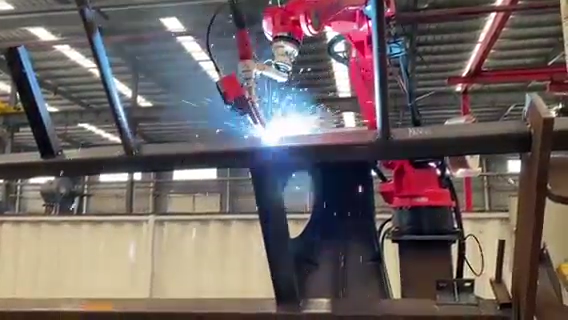
ഈ സാഹചര്യത്തിൽ, ഉയർന്ന വഴക്കവും സ്ഥിരതയും വിശ്വാസ്യതയുമുള്ള ലേസർ വെൽഡിംഗ് സീം ട്രാക്കിംഗ് സിസ്റ്റം ഉപയോഗിച്ച് വെൽഡിങ്ങിനായി Yooheart ഇന്റലിജന്റ് റോബോട്ട് HY1006A-145 ഉപയോഗിക്കുന്നു.
ഓരോ വെൽഡിങ്ങിനും മുമ്പായി, ഉപകരണങ്ങൾ ആദ്യം വെൽഡിംഗ് സീം ലൊക്കേറ്റിംഗ് വഴി വെൽഡിംഗ് സീമിന്റെ കോർഡിനേറ്റ് സ്കാൻ ചെയ്ത് രേഖപ്പെടുത്തുന്നു, തുടർന്ന് ആന്തരിക അൽഗോരിതം ഉപയോഗിച്ച് കോർഡിനേറ്റ് ഓഫ്സെറ്റ് കണക്കാക്കുകയും റഫറൻസ് കോർഡിനേറ്റ് പാരാമീറ്ററുകൾ യഥാർത്ഥ സമയത്തേക്ക് ഇടുകയും ചെയ്യുന്നു, അങ്ങനെ വെൽഡിങ്ങിനു ശേഷമുള്ള ഉൽപ്പന്നത്തിന്റെ സീലിംഗും സമഗ്രതയും ഉറപ്പാക്കാൻ സമയത്തിലെ യഥാർത്ഥ വ്യതിയാനം ശരിയാക്കുന്നു.
"ഫോർ പോയിന്റ് ഇന്റർസെക്ഷൻ" രീതി

ലേസർ സീം ട്രാക്കിംഗ് സിസ്റ്റം
കോറഗേറ്റഡ് പ്ലേറ്റ് മോർട്ടാർ

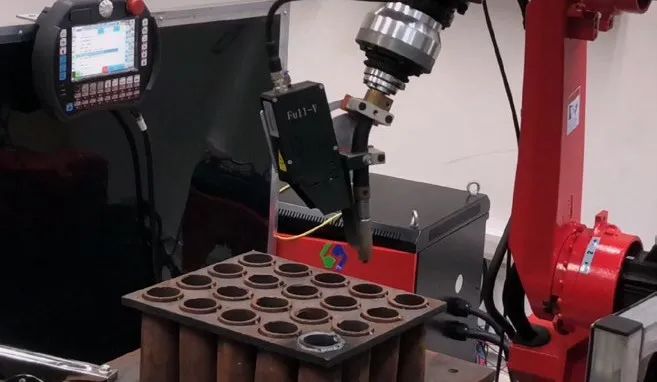
റൗണ്ട് ഹോൾ ഓട്ടോമാറ്റിക് പ്ലഗ് വെൽഡിംഗ് സൊല്യൂഷൻ

വൃത്താകൃതിയിലുള്ള സീം മോർട്ടാർ

ട്യൂബ്പ്ലേറ്റ് സൊല്യൂഷനുകൾ
പോസ്റ്റ് സമയം: ഏപ്രിൽ-09-2022



